Обычно обмотка якоря имеет вид дирижер, и он покрывается одинарным хлопковым покрытием, двойным хлопковым покрытием, иначе хлопковым стекловолокном и эмалью. Обычно валки якорной обмотки скрепляются между собой хлопчатобумажной лентой. Таким образом, катушки будут погружены в пропитанный лак, а затем высушены. Обмотка якоря определяется как правильное соединение проводников, которые размещены и защищены в пазах якоря. Эти обмотки располагаются в пазах якоря. Полезный ЭДС будет поощряться в этой обмотке, полученной через щетки. В данной статье рассмотрено, что такое обмотка якоря, и ее виды.
Что такое обмотка якоря?
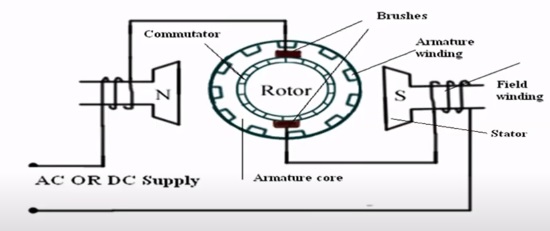
Обмотка якоря можно определить как, электрическая машина в котором ЭДС может генерироваться из-за потока поля воздушного зазора. Следует отметить, что воздушный зазор образуется из-за Постоянный ток течь в обмотке. Как правило, эта обмотка размещается в пазах статора и обмотка возбуждения на пазах ротора. Двигатель постоянного тока схема обмотки якоря показано ниже.

Как правило, это размещается на статор пазы и обмотка возбуждения на пазах ротора к машине синхронной. Эта обмотка размещается в пазах ротора, тогда как обмотка возбуждения размещается в пазах статора. Конструкция обмотки якоря может быть выполнена из меди и включает в себя огромное количество изолированных катушек. Эти две катушки могут иметь несколько витков и могут быть соединены либо последовательно, либо параллельно, в зависимости от требуемого типа обмотки.
Типы обмотки якоря
В общем, обмотка якоря в машине постоянного тока наматывается с использованием двух методов, и они также известны как типы обмотки якоря, такие как Круговая обмотка и Волновая обмотка.
а). Круговая обмотка
В этом типе обмотки соединение проводники делается таким образом, чтобы их параллельные полюса и дорожки были похожи. Последняя часть каждой обмотки якоря может быть подключена к соседней секции на коммутатор. Число щеток в этой обмотке может быть аналогично числу параллельных полос, причем эти щетки равномерно разделены на обмотки положительной и отрицательной полярности. применение круговой обмотки в основном включают сильноточные, низковольтные машины. круговые обмотки подразделяются на три типа, которые включают следующие.
1). Обмотка симплексного типа
В такой обмотке конец одной катушки соединен с секцией коммутатора, а начало вторичной обмотки может быть расположено под таким же полюсом, а также число параллельных витков равно числу полюсов обмотки.

2). Дуплексная обмотка внахлестку
В этом типе обмотки число параллельных полос между полюсами вдвое превышает число полюсов. применение круговой обмотки в основном связаны с огромными текущими приложениями. Такая обмотка получается путем размещения двух одинаковых обмоток на аналогичном якоре, а также соединения четных коллекторных стержней с первичной обмоткой и выключенного числа со вторичной обмоткой.
3). Триплексная обмотка внахлестку
В этом типе обмотки обмотки связаны с 1/3 стержней коммутатора. Эта обмотка внахлестку имеет несколько дорожек, поэтому применение триплексной обмотки внахлестку в основном связаны с огромными текущими приложениями. главный недостаток этой обмотки в том, что в ней используется несколько проводников что увеличит стоимость намотки.
б).Волновая обмотка
В этом виде волновой обмотки имеется только две параллельные дорожки среди положительных и отрицательных щеток. Конечный конец первой обмотки якоря соединен с начальным концом второй катушка якоря сегмент коммутатора на некотором расстоянии. В такой обмотке проводники связаны с двумя параллельными полосами машинных полюсов. Цифра параллельных портов эквивалентна цифре щеток. Этот вид обмотки применим для слаботочных, высоковольтных машин.
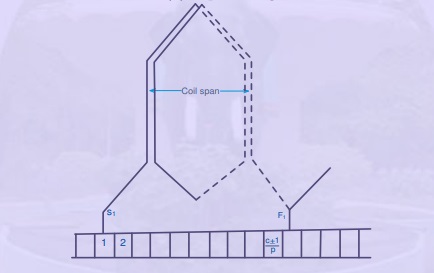
После прохождения одного витка обмотка якоря падает в паз слева от начальной точки. Поэтому этот тип обмотки называется регрессивной обмоткой. Точно так же, когда обмотки якоря опускаются на один паз вправо, это называется прогрессивной обмоткой.
Предположим, что два слоя обмотки и что проводник AB должен находиться в полуслое верхнего слоя справа или слева. Предположим, что YF и YB — это передний и задний шаг. Величина этих шагов почти такая же, как шаг полюса обмотки. Следующее уравнение дает средний шаг намотки.
Следующее уравнение определяет стандартный шаг обмотки.
Если всего нет. проводника ZA, то нормальный шаг можно определить по следующему уравнению
В приведенном выше уравнении количество полюсов может быть обозначено буквой «P», и оно всегда четное, поэтому Z всегда измеряется как четная цифра Z = PY.A ± 2. Здесь оба знака, такие как + и –, используются как для прогрессивной, так и для регрессивной обмотки.
Таким образом, это все о что такое арматура, различные виды арматуры. Наконец, из приведенной выше информации мы можем сделать вывод, что эти обмотки являются важными компонентами электрической машины. Он состоит из набора катушек в пазах, равномерно расположенных по краю якоря. Вот вопрос к вам, что такое отличие обмотки возбуждения от обмотки якоря?
Универсальные двигатели: конструкция, типы, работа и применение
Универсальные двигатели – это специально разработанные серийные двигатели, которые работают примерно с одинаковой скоростью и выходной мощностью как на переменном, так и на постоянном токе, приводя в действие все виды оборудования. Он имеет переменную скорость и высокие характеристики пускового момента. Он работает на опасно высокой скорости без нагрузки, поэтому такие двигатели обычно встраиваются в приводное устройство. На самом деле это уменьшенная версия двигателя переменного тока.
Основы двигателя серии переменного тока:
Если бы обычный двигатель постоянного тока был подключен к сети переменного тока. Он будет создавать и вращать однонаправленный крутящий момент, потому что ток, протекающий как по якорю, так и по полю, меняется одновременно. Однако развиваемый крутящий момент не имеет постоянной величины (как в последовательном двигателе постоянного тока), а пульсирует между нулем и максимальным значением каждый полупериод. Но производительность таких моторов не будет удовлетворительной по следующей причине:
- Переменный поток вызовет чрезмерные потери на вихревые токи в ярме и сердечниках возбуждения, которые будут сильно нагреваться.
- На щетках будет возникать сильное искрение из-за огромного напряжения и тока, индуцируемых в короткозамкнутых обмотках якоря в периоды их коммутации.
- Коэффициент мощности низкий из-за высокой индуктивности цепей возбуждения и якоря.
- Однако путем надлежащей модификации конструкции и других усовершенствований был произведен удовлетворительный одиночный двигатель.
- Потери на вихревые токи были уменьшены за счет ламинирования всей железной конструкции сердечника возбуждения и ярма.
- Повышение коэффициента мощности возможно только за счет уменьшения величин реактивных сопротивлений обмотки возбуждения и якоря.
- Реактивное сопротивление поля уменьшается за счет уменьшения числа витков обмотки возбуждения.
- Для данного тока это уменьшит МДС поля, что приведет к уменьшению потока в воздушном зазоре.
- Это приведет к увеличению скорости, но уменьшит крутящий момент двигателя. Для получения того же крутящего момента теперь необходимо будет увеличить число оборотов якоря пропорционально.
Конструкция универсального двигателя:
Статор состоит из обмотки возбуждения, имеющей полюса возбуждения. Обмотка предназначена для создания магнитного поля в двигателе. Ротор представляет собой не что иное, как якорь, имеющий многослойный сердечник якоря. В этих шлюхах предусмотрена якорная обмотка и вместе с ней приведен коммутатор. Соединение обмотки соединено с коммутатором. Щетки служат для подключения питания к обмотке якоря.
Статор: обмотка возбуждения для создания магнитного поля.
Ротор: обмотка якоря с током через угольные щетки для создания магнитного поля.
Щетки: механическая связь с питанием и обмоткой ротора, коллектором и компенсационной обмоткой.
Обычно они имеют стационарное поле, называемое статором, которое напрямую связано с напряжением питания в роторе, также называемом якорем, который получает напряжение питания через коммутатор. Когда якорь вращается, происходит необходимая смена полярности, чтобы якорь продолжал вращаться. давайте предположим, что наш двигатель будет работать только на постоянном токе, сначала давайте подключим статор к источнику питания для простоты, мы будем думать о нем как о батарее, в зависимости от направления обмотки статор станет электромагнитом. В этом случае северный полюс электромагнита находится вверху, а южный полюс внизу, пока он подключен к источнику питания, северный полюс будет вверху, а южный полюс внизу. теперь посмотрим на якорь в середине магнитного поля электромагнита через коммутатор подключаем обмотку якоря к источнику питания опять представим что направление обмотки такое что в якоре у нас северный полюс вверху и Южный полюс внизу. Кисти, слегка смещенные по часовой стрелке, увидели отклонение между двумя северными полюсами. В двух южных полюсах якорь вращается по часовой стрелке, якорь будет вращаться на 180 градусов, пытаясь удержать северный полюс лицом к южному полюсу, а южный полюс обращен к северному полюсу, и эти две вещи произойдут из-за веса якоря. Инерция заставит якорь повернуться немного больше, чем на 180 градусов, кроме того, коммутатор изменит местами соединения, так что северный полюс снова появится вверху, а южный полюс внизу, это действие повторяется бесконечно, пока статор и щетки продолжать подключение к источнику питания. Чтобы якорь вращался против часовой стрелки, просто поменяйте местами провода, подключенные к щеткам, или вы также можете изменить его вращение, поменяв местами провода, идущие к статору, если вместо использования батареи мы подключим наш двигатель к источнику переменного тока, результат будет то же самое, поскольку то, что действительно заставляет его работать, – это относительная полярность магнитного поля статора и магнитного поля ротора якоря, это в основном последовательность работы щеточного электродвигателя, также называемого универсальным двигателем. Поскольку он работает как на постоянном, так и на переменном токе, обычно наиболее часто используются двигатели с последовательной обмоткой, то есть со статором и якорем, соединенными последовательно. Это двигатели с высоким пусковым моментом, которые в основном используются в качестве стартера для двигателей внутреннего сгорания, а также для импортных шаровых сверл в таких приборах, как миксеры, блендеры и т. д.
Типы универсальных двигателей по конструкции:
- Сосредоточенный полюс, без компенсации
- Распределенный, с компенсацией поля
Некомпенсирующий с сосредоточенным полюсом:
В этом типе предусмотрены явно выраженные полюса и многослойные полюса, чтобы уменьшить потери на вихревые токи. Поскольку мы используем этот двигатель как для питания переменного, так и постоянного тока, когда мы используем источник переменного тока, он будет выделять тепло из-за потерь на вихревые токи. Как правило, для уменьшения потерь на вихревые токи используется многослойная деталь.
На второй схеме, где якорь представляет собой не что иное, как ротор, якорь и обмотка возбуждения соединены последовательно.

Компенсированный тип с распределенным полем:
Предусмотрена компенсационная обмотка, включенная последовательно с основной обмоткой возбуждения. На первом рисунке компенсационная обмотка дана с обмоткой возбуждения. Обычно компенсационная обмотка используется для уменьшения напряжения реактивного сопротивления, присутствующего в якоре, после чего двигатель работает от сети переменного тока. По мере увеличения частоты реактивное сопротивление будет увеличиваться, и из-за этого увеличивается напряжение на этой обмотке. Компенсационная обмотка используется для уменьшения реактивного сопротивления якоря. Мы также можем уменьшить его, используя меньшее количество витков для этой обмотки.

На второй схеме видно, что якорь, основная обмотка возбуждения и компенсационная обмотка соединены последовательно. Мы можем подключить однофазный источник переменного тока или источник постоянного тока для этого двигателя. Вот почему дано универсальное название, потому что оно используется как для переменного, так и для постоянного тока.
Работа универсального двигателя:
Последовательная обмотка возбуждения будет использоваться для создания магнитного поля. Северный и Южный полюсы создаются с помощью этой обмотки. Проводник якоря соединен с коммутатором через щетки. Мы можем подключить к нему источник переменного или постоянного тока.

Теперь, если мы подключим источник постоянного тока к этому двигателю, работа будет такой же, как у двигателя постоянного тока. Всякий раз, когда проводник с током помещается в магнитное поле, на этот проводник с током создается механическая сила. Мы можем найти направление движения или силу, которая создается на проводнике с током, используя правило левой руки Флеминга, которое гласит, что если мы поместим три пальца левой руки, средний, безымянный и большой пальцы перпендикулярны друг другу. Затем безымянный палец указывает направление магнитного поля, средний палец указывает направление тока, а большой палец указывает силу, действующую на проводник с током. В магнитном поле сила, действующая на проводник с током, направлена вверх, а магнитный поток, создаваемый основной обмоткой, направлен влево.
Если мы подключим источник переменного тока к этому двигателю, направление тока через последовательную обмотку возбуждения и обмотку якоря будет обратным для положительного и отрицательного цикла. Таким образом, крутящий момент, создаваемый на проводнике с током, имеет такое же направление. Таким образом, мы можем сказать, что однонаправленный крутящий момент создается за счет положительного и отрицательного цикла.
Скоростные характеристики универсального двигателя:
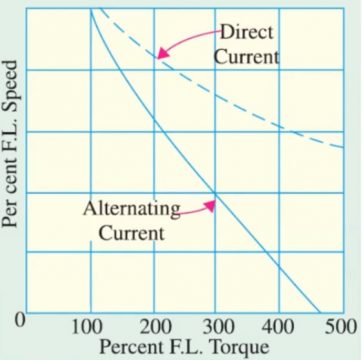
Скорость обратно пропорциональна току якоря. Скорость также обратно пропорциональна крутящему моменту. Шестерни используются для получения необходимой скорости для требуемой нагрузки. Скорость универсального двигателя изменяется точно так же, как и скорость последовательного двигателя постоянного тока, т. е. низкая при полной нагрузке и высокая при холостом ходе (в некоторых случаях около 20000 об/мин). Обычно эти двигатели работают с нагрузкой при пуске, потому что эти двигатели работают с очень большой скоростью. Фактически на холостом ходу скорость ограничивается только собственным трением и парусной нагрузкой. На рисунке показаны типичные характеристики крутящего момента универсального двигателя как для переменного, так и для постоянного тока. Обычно зубчатые передачи используются для снижения фактической скорости нагрузки до надлежащих значений.
В универсальных двигателях при увеличении нагрузки скорость будет уменьшаться. Если мы хотим, чтобы универсальные двигатели работали аналогичным образом. Это возможно, когда мы работаем с двигателем на высокой скорости.
Реверс вращения:
Универсальный двигатель с сосредоточенным полюсом или явно выраженным полюсом можно реверсировать путем изменения направления тока через якорь или обмотку возбуждения. Обычный метод заключается в замене проводов на держателях щеток.




:max_bytes(150000):strip_icc()/Olive-wood-serrated-knife-kitchen-knives-XL-BLOG0419-810c14d71c8c41b38ca2ed7afe47516e.jpg)
